
Lidar & Sonar Testing on a Raft in a tunnel.
Lidar & Sonar Testing on a Raft in a tunnel.
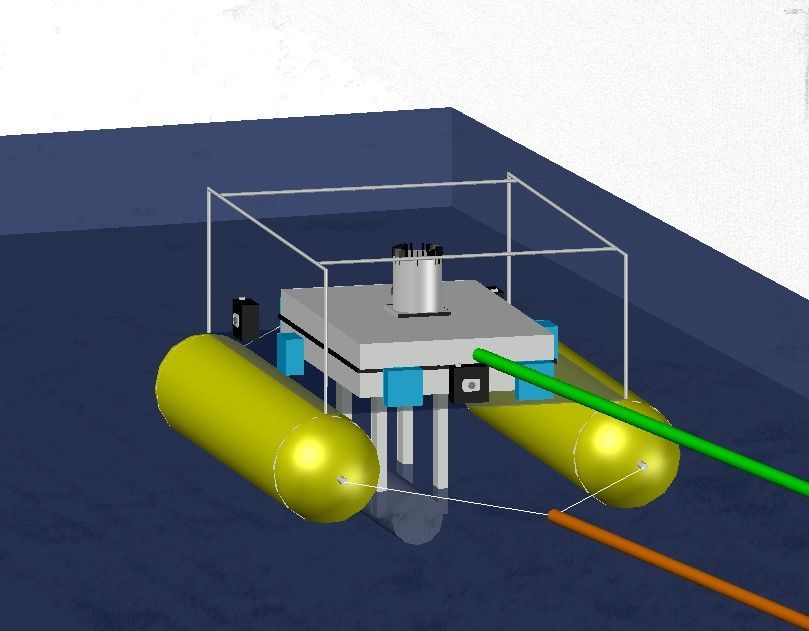
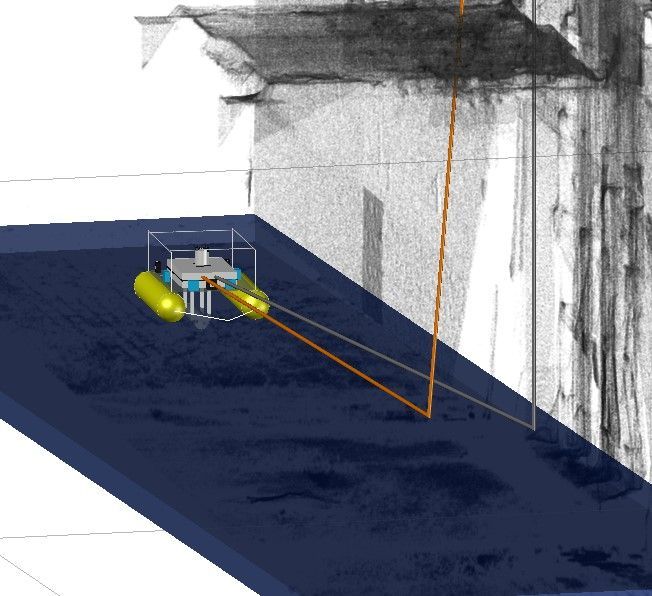
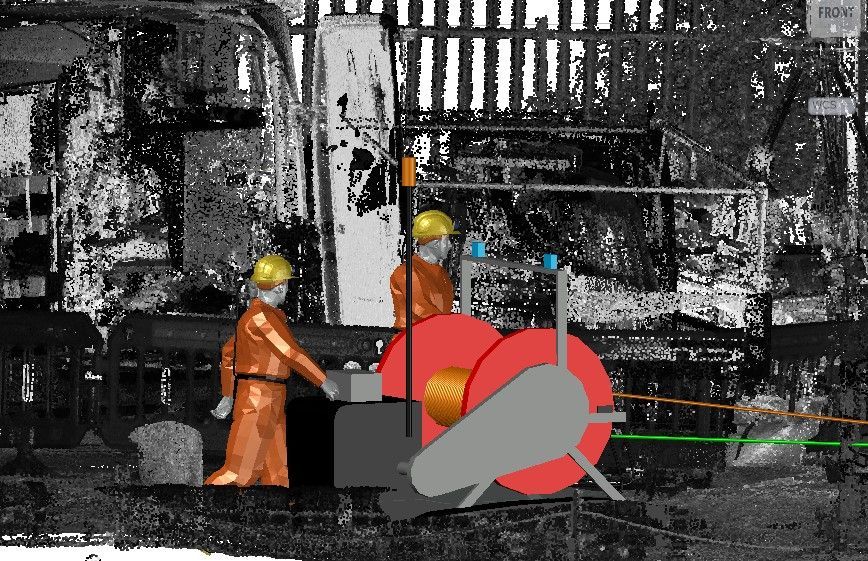

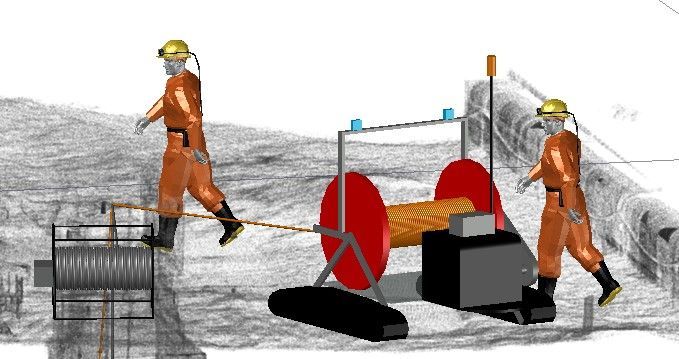
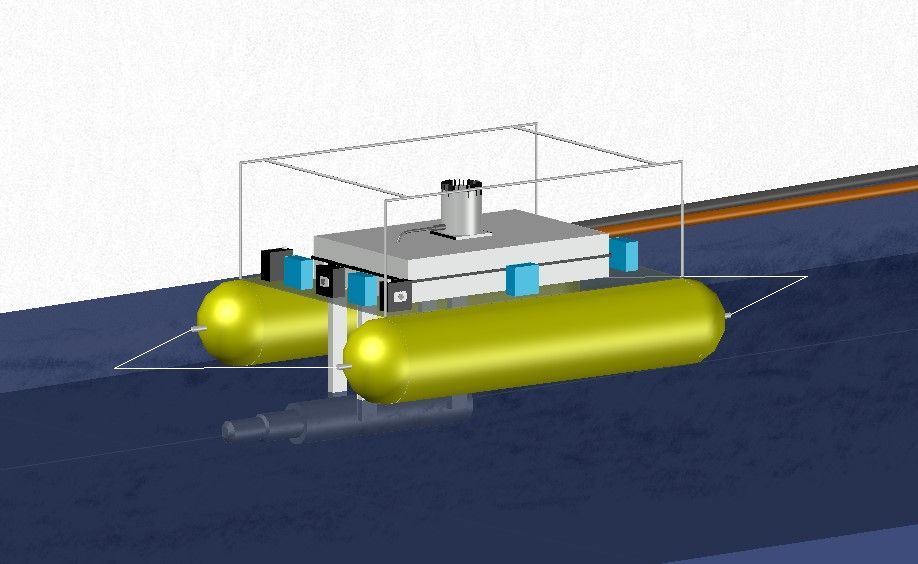
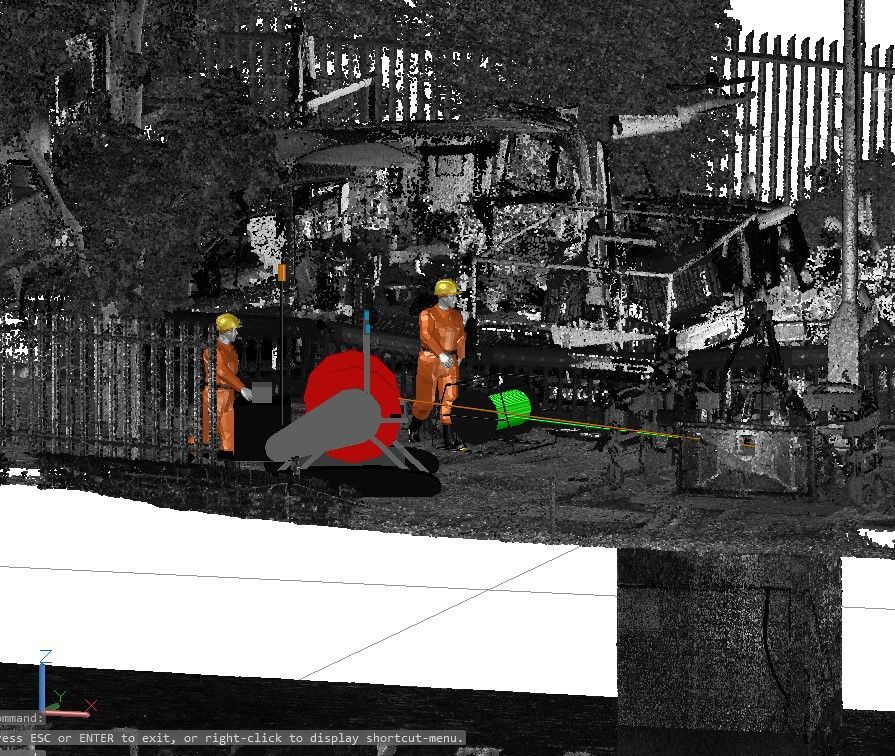
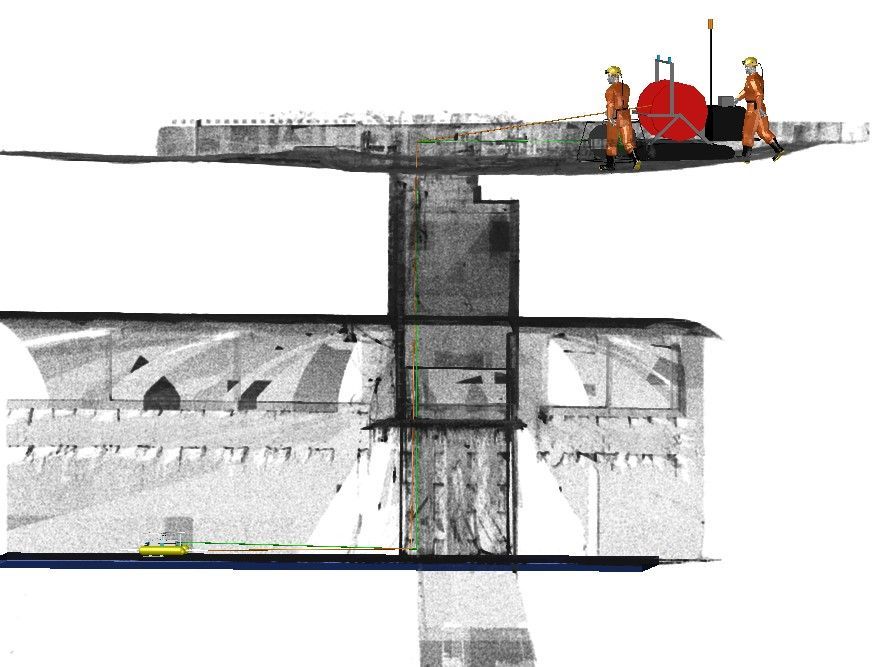
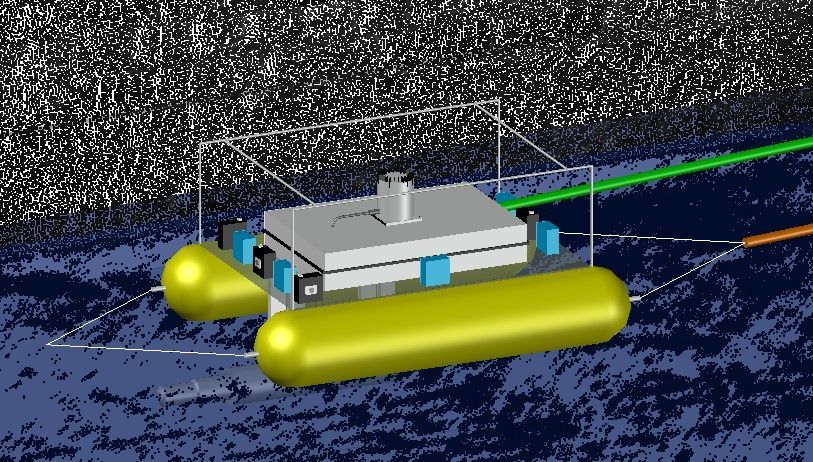
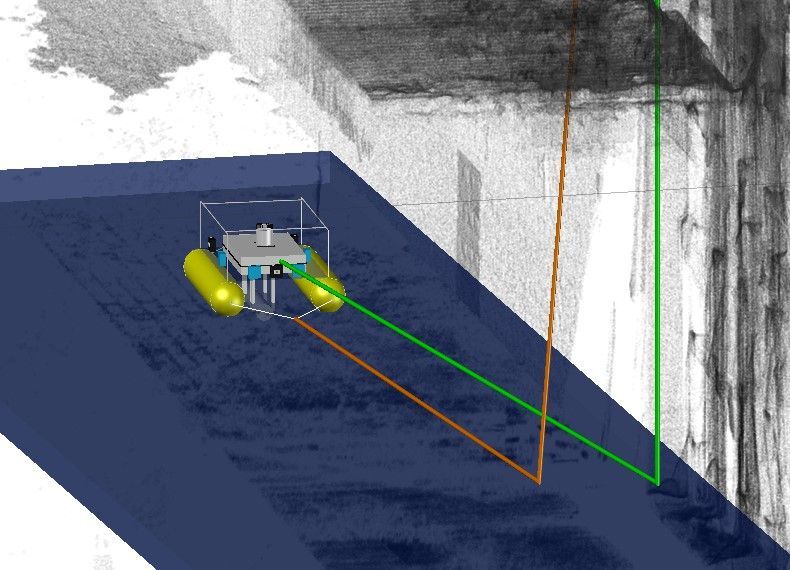
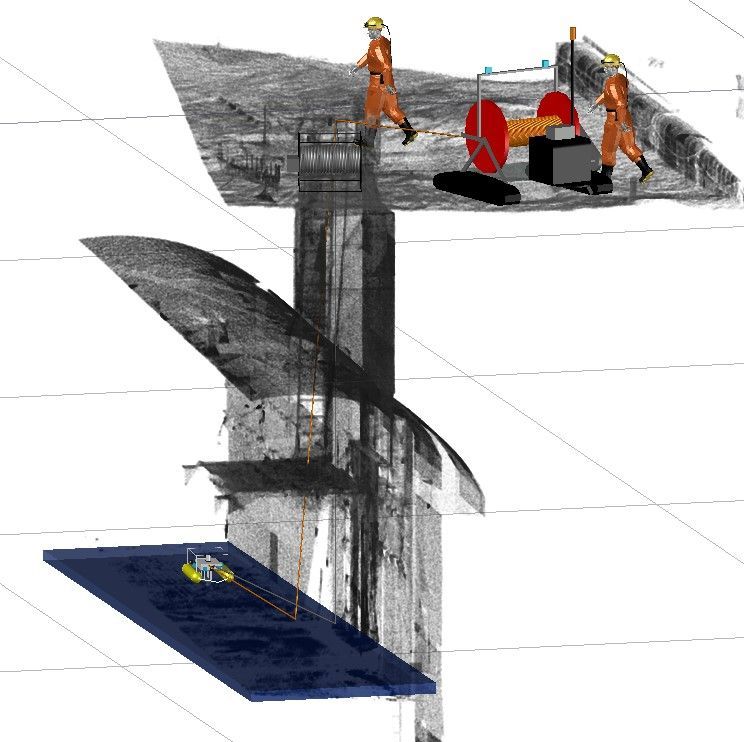
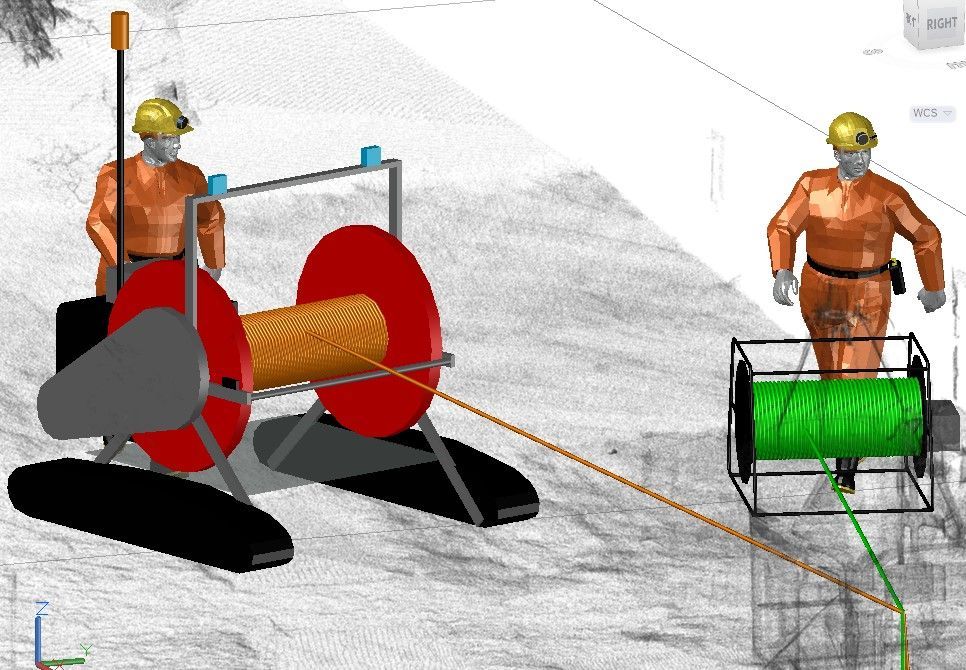

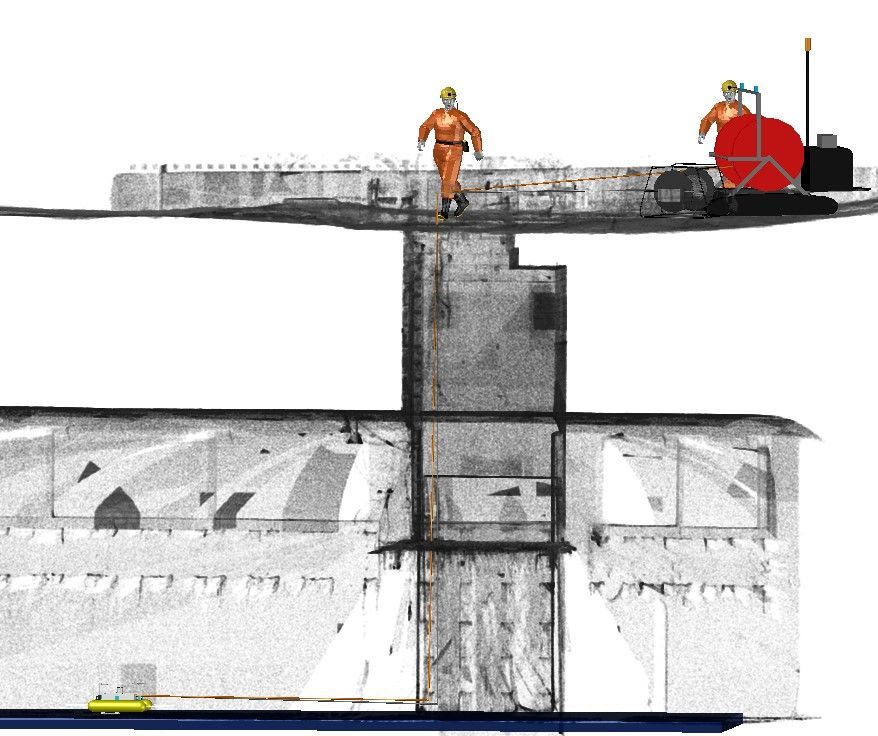
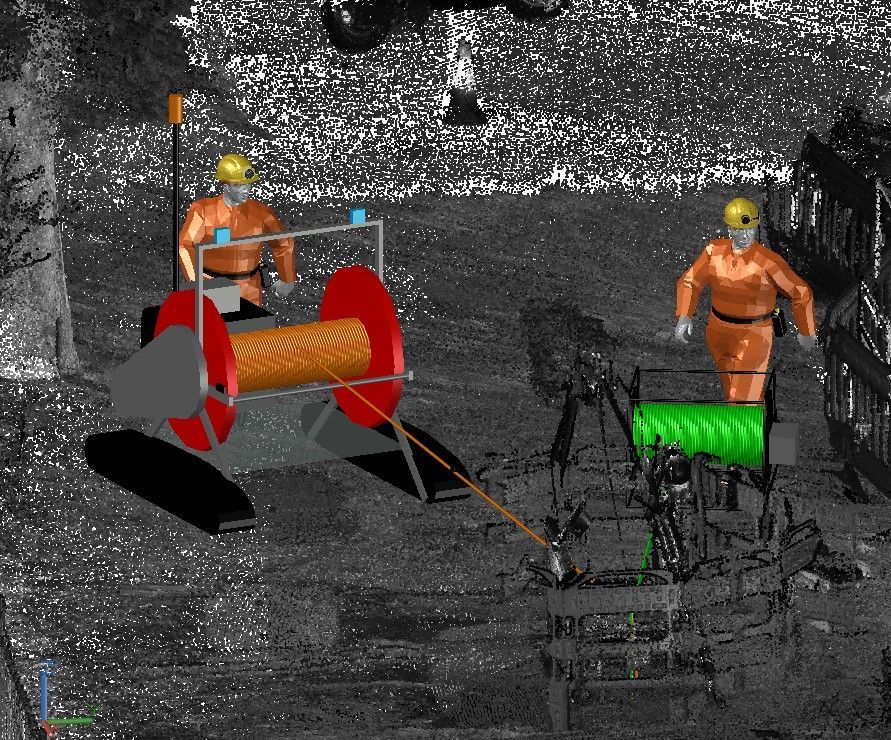


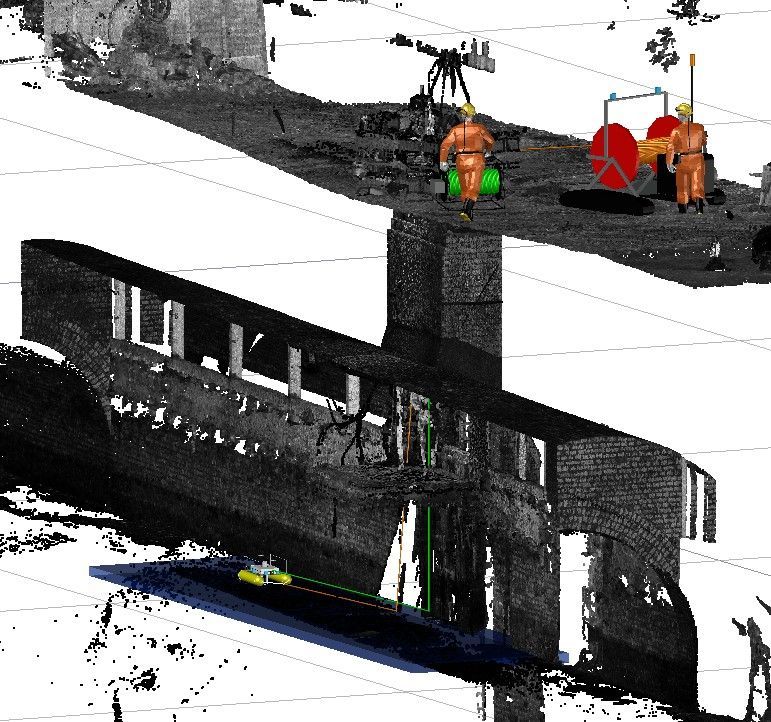

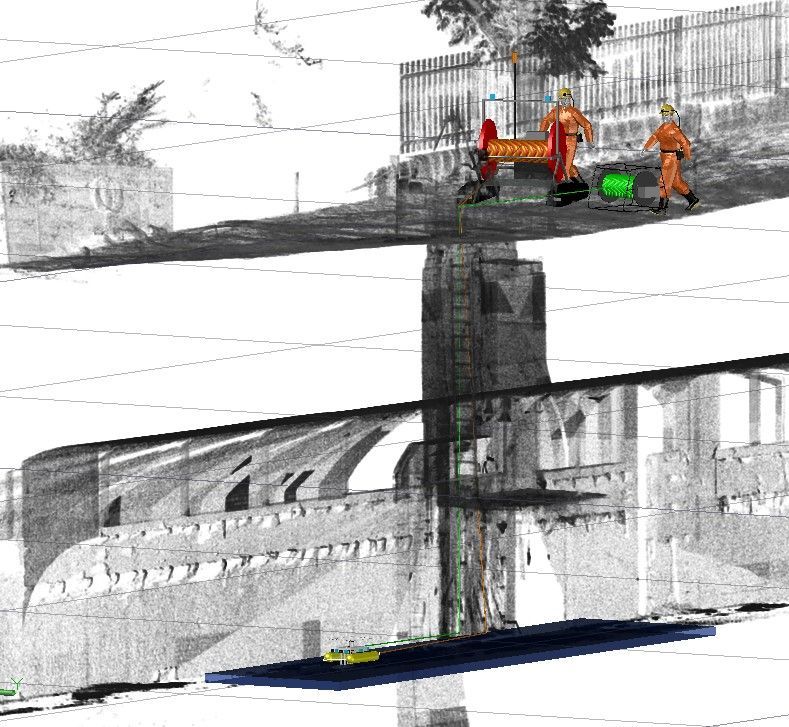

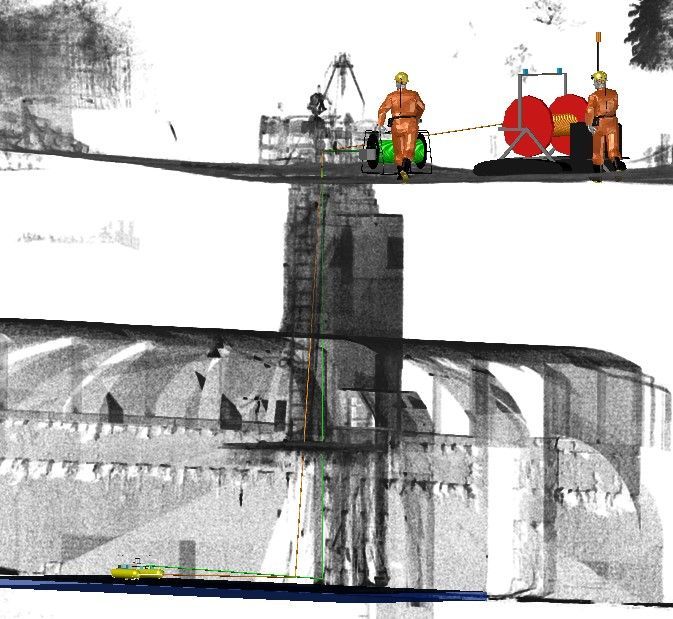


A Trial to test Lidar and Sonar in a 2.7 meter diameter tunnel which had 40% effluent water has been carried out, this report provides feedback from the site procedures carrying out the survey, and an analysis of the data. The survey was carried out in the day from a large chamber to gain access into the tunnel, the water level was 3.5 meters from ground level, with a medium flow, the effluent water carried rag and other household waste. The raft was deployed with 4 cameras, a lidar sensor and sonar, the raft was tethered to a Porto-reel drum by rope, the cam-eras on the raft where tethered to a cable drum by means of fibre optic cable which allowed live streaming from the cameras within the tunnel, The Lidar and the sonar where mounted on the raft and connected directly to a battery and computer also mounted on the raft. The survey consisted of a 190 meter downstream pass, stopped and then pulled back upstream. Their was no man entry procedures required for this trial survey.
The lidar device used for the trail had the following spec…
VERTICAL RESOLUTION - 128 channels, HORIZONTAL RESOLUTION - 2048, RANGE—50m, VERTICAL FIELD OF VIEW -90° (±45°) , PRECISION - 15mm, WEIGHT - 447 g, INGRESS PROTECTION RATING IP68, IP69K.
The Lidar was mounted to the raft on top of a peli-box which housed the battery and computer.
As the raft travel along the tunnel the lidar data was recorded and stored directly to a solid state drive.
The Sonar device used for the trail had the following spec…
Acoustic Frequency: 2MHz Beam Width: 1.1 degrees conical Receiver: Logarithmic
Bandwidth: 500kHZ Pitch/Roll Sensors: 3 Axis accelerometers, resolution 0.1 degrees
The Sonar was mounted below the raft 300mm below the water line, the peli-box housed the battery and computer. A deflector shield was also mounted to protect the sonar from rag and debris.
As the raft travelled along the tunnel the sonar data was recorded and stored directly to a solid state drive.
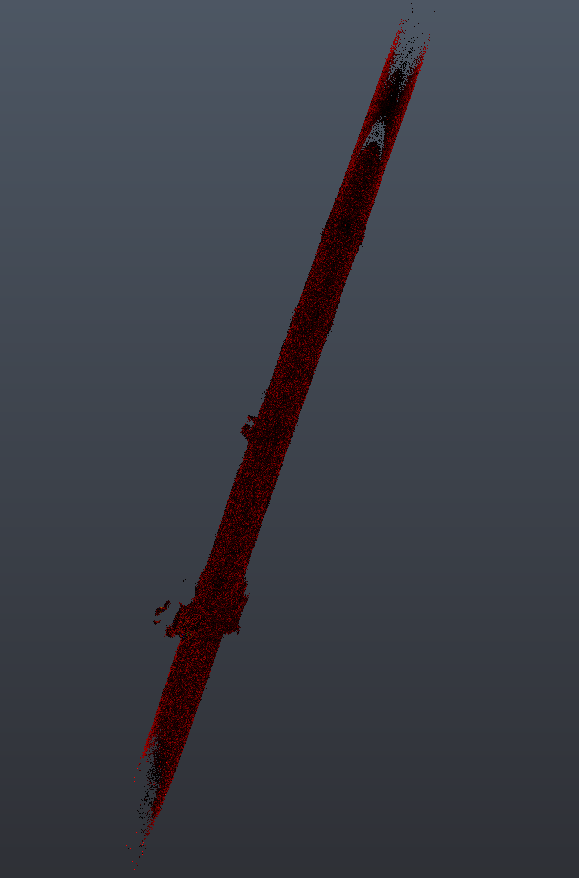
After the trial the Lidar data was sent to a software engineer for post processing,
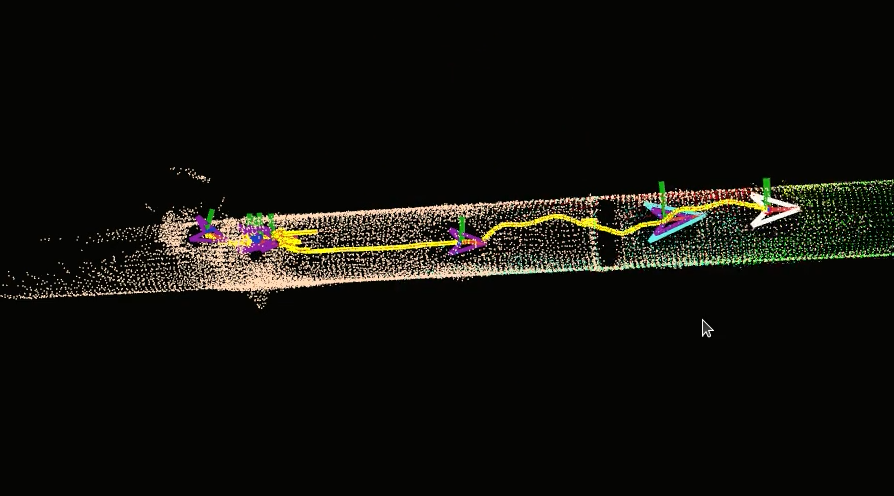
the Raw data was processed by means of SLAM registration, lets
explain… Simultaneous Localization And Mapping – it’s essentially complex
algorithms that maps an unknown environment.
Using SLAM software, a device can simultaneously localise (locate itself
in the map) and map (create a virtual map of the location) using SLAM algorithms.
Here's a video that shows a snippet of that process
After receiving the data from the software engineer, the next step begins,.
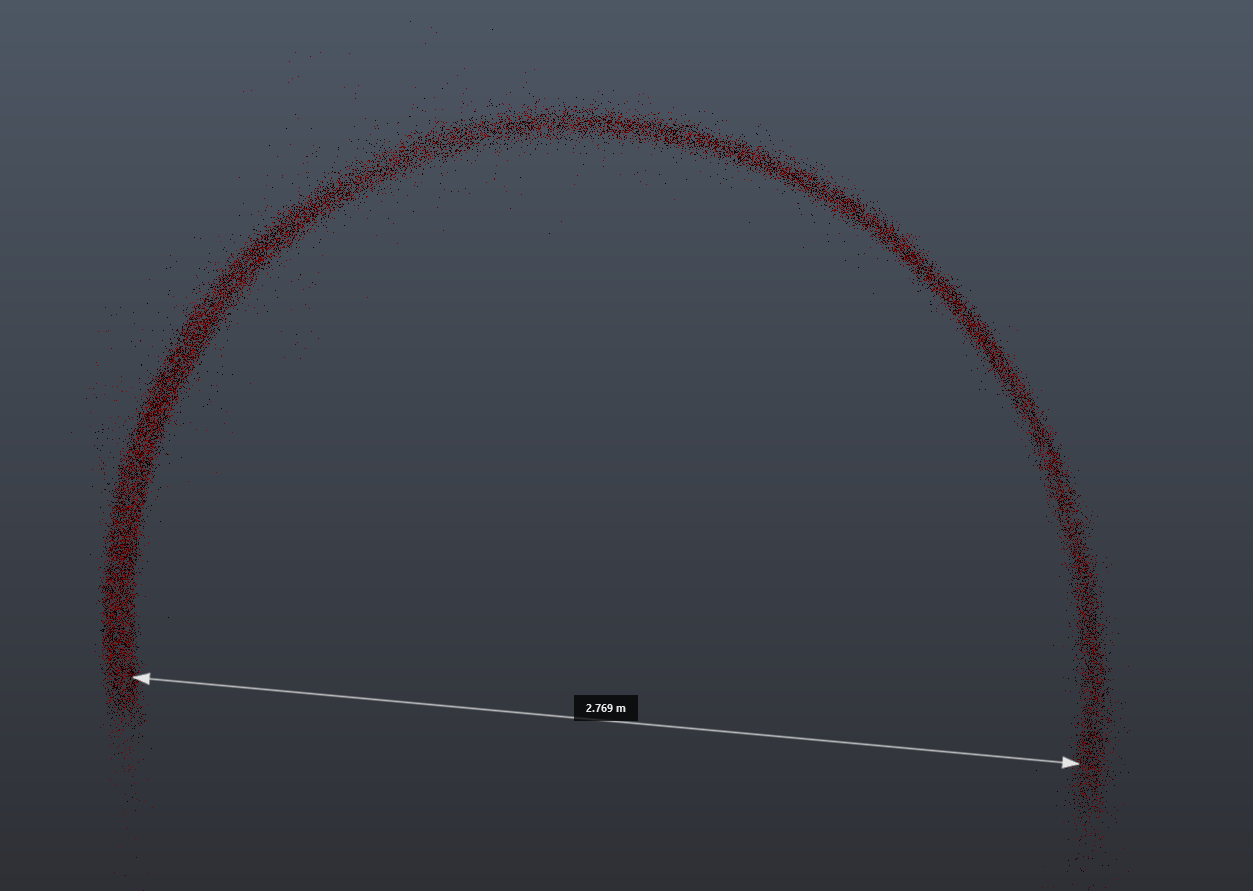
Using more common file types the data was imported and exported through various software's, the overall initial results are promising, considering the environment and technical challenges to carry out such a trial the end results are as follows…
The point cloud has an accuracy of +-15mm
No stretching or skewing has been seen in the data
The data can be aligned to known fixed positions
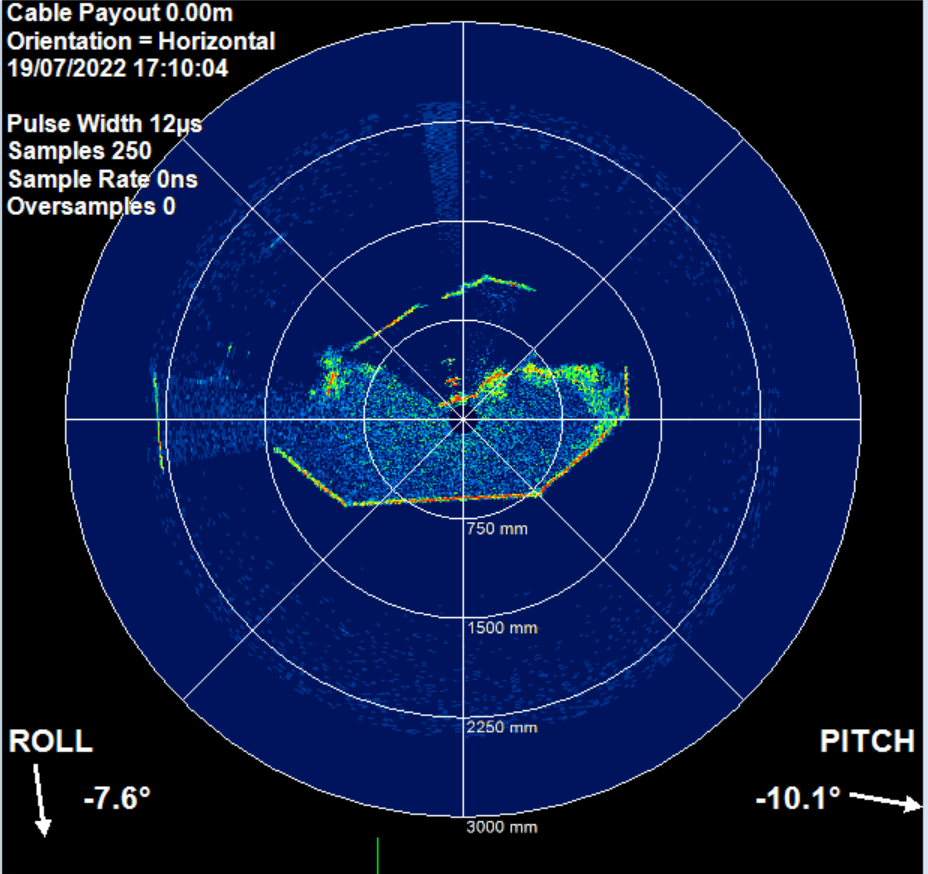
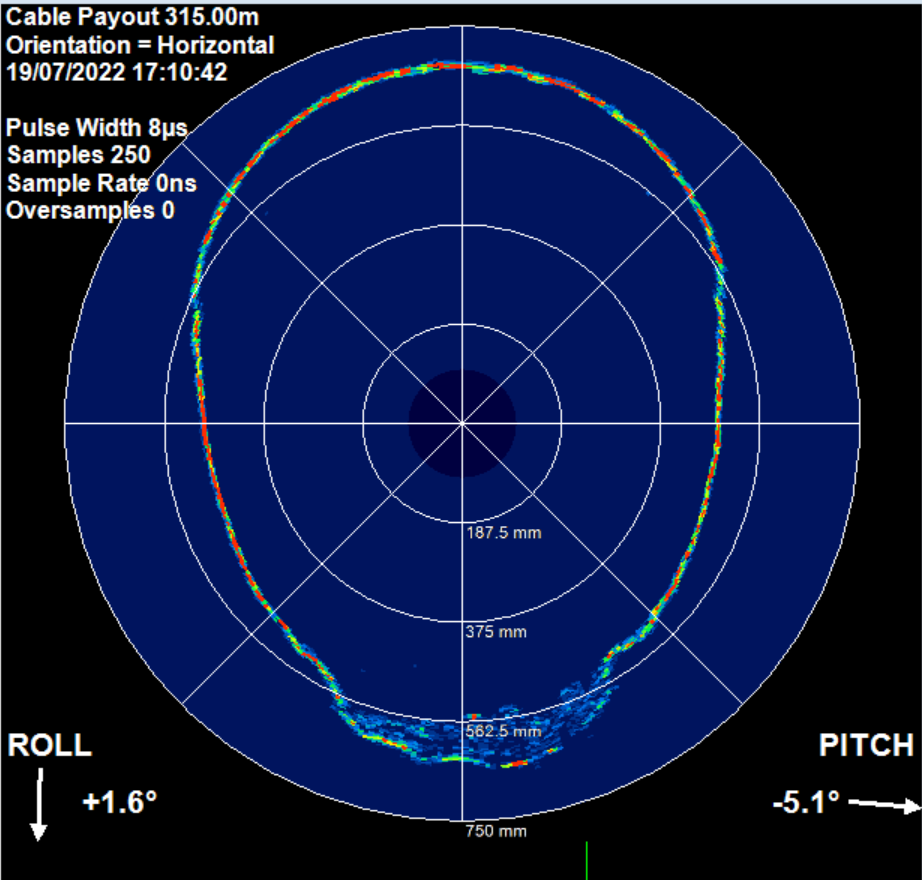
The sonar results are instant, when the raft is removed from the tunnel, the data can be viewed on the computer onsite, for both the sonar and Lidar an interim sanity check is carried out to ensure the hardware has stored the data. For this trail an older and reliable method of recording time durations thought-out the survey gave the survey crew sufficient info on analysis to understand where the raft was in the tunnel at any given time, the same info would be used for post processing purposes.
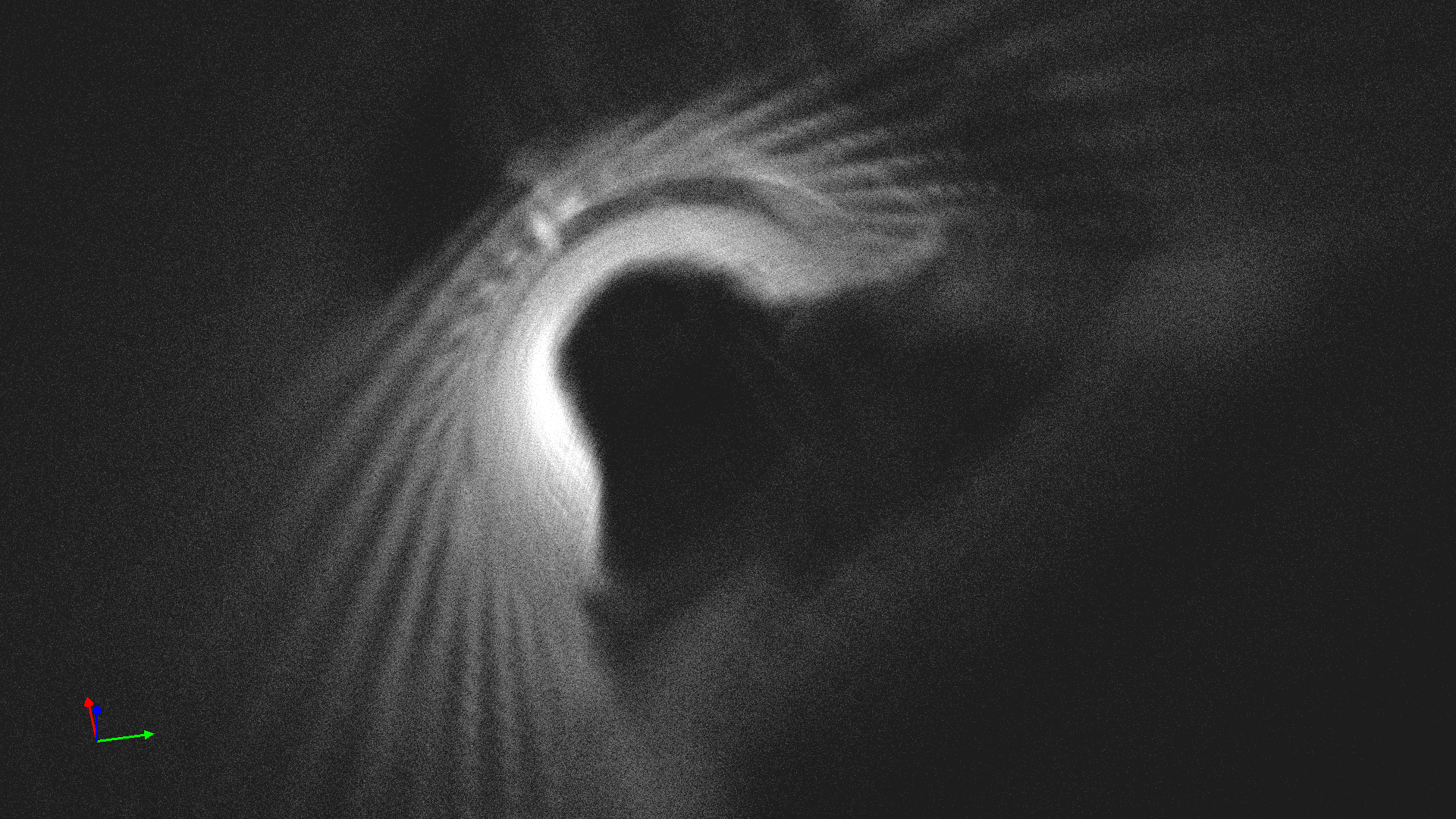
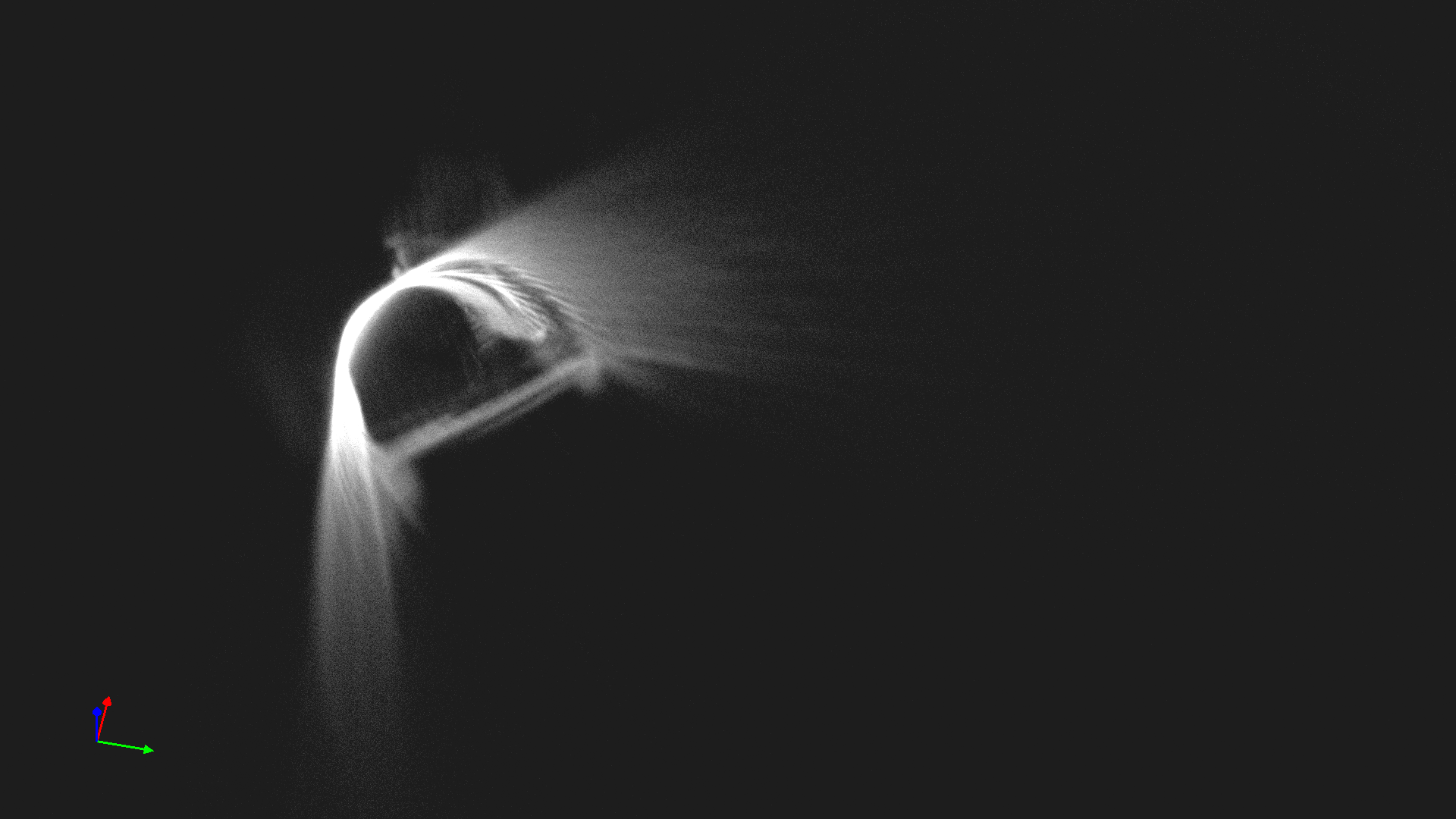
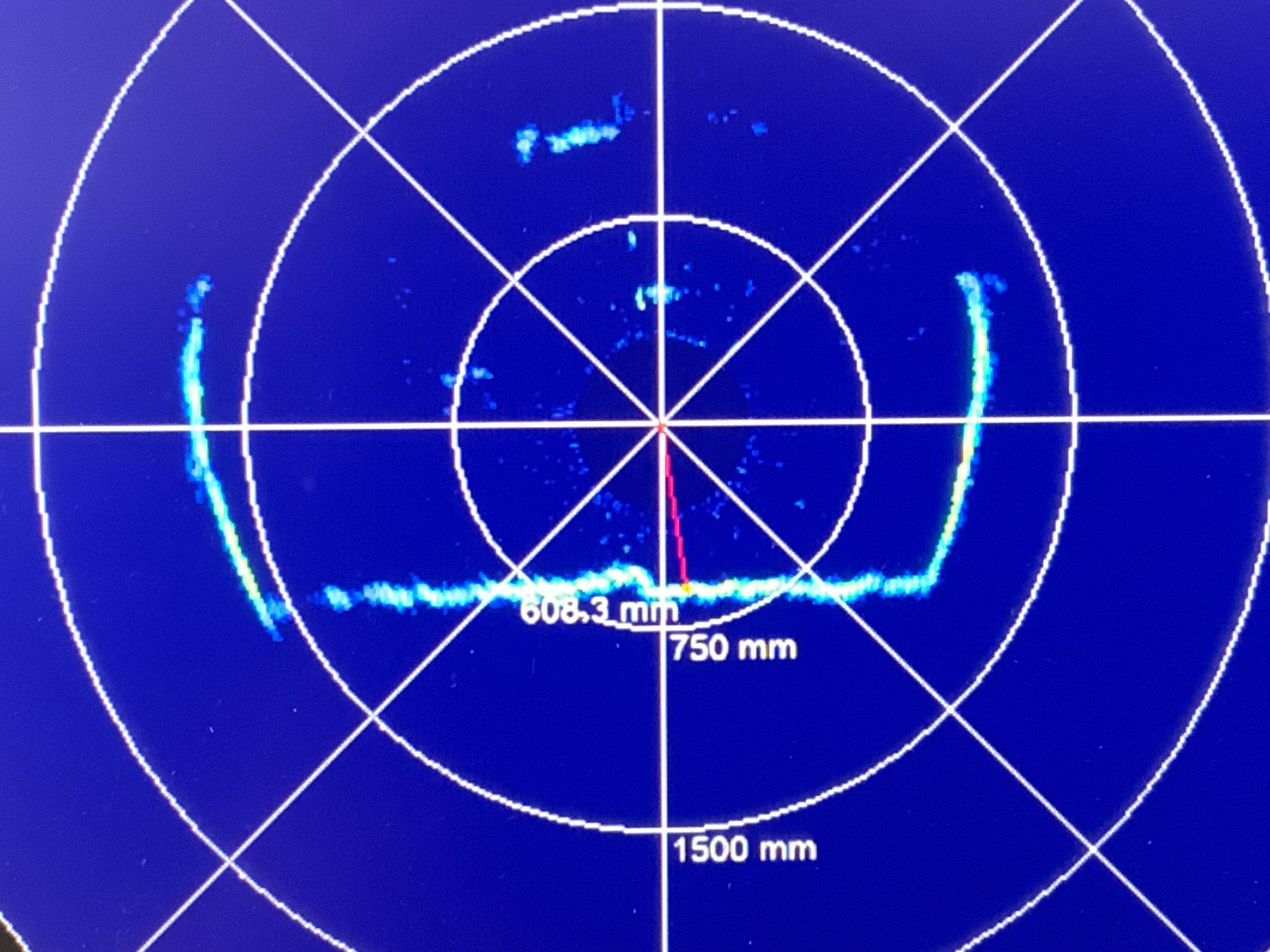
Here's some photos and video that shows the sonar da-ta as it travels along the tunnel.
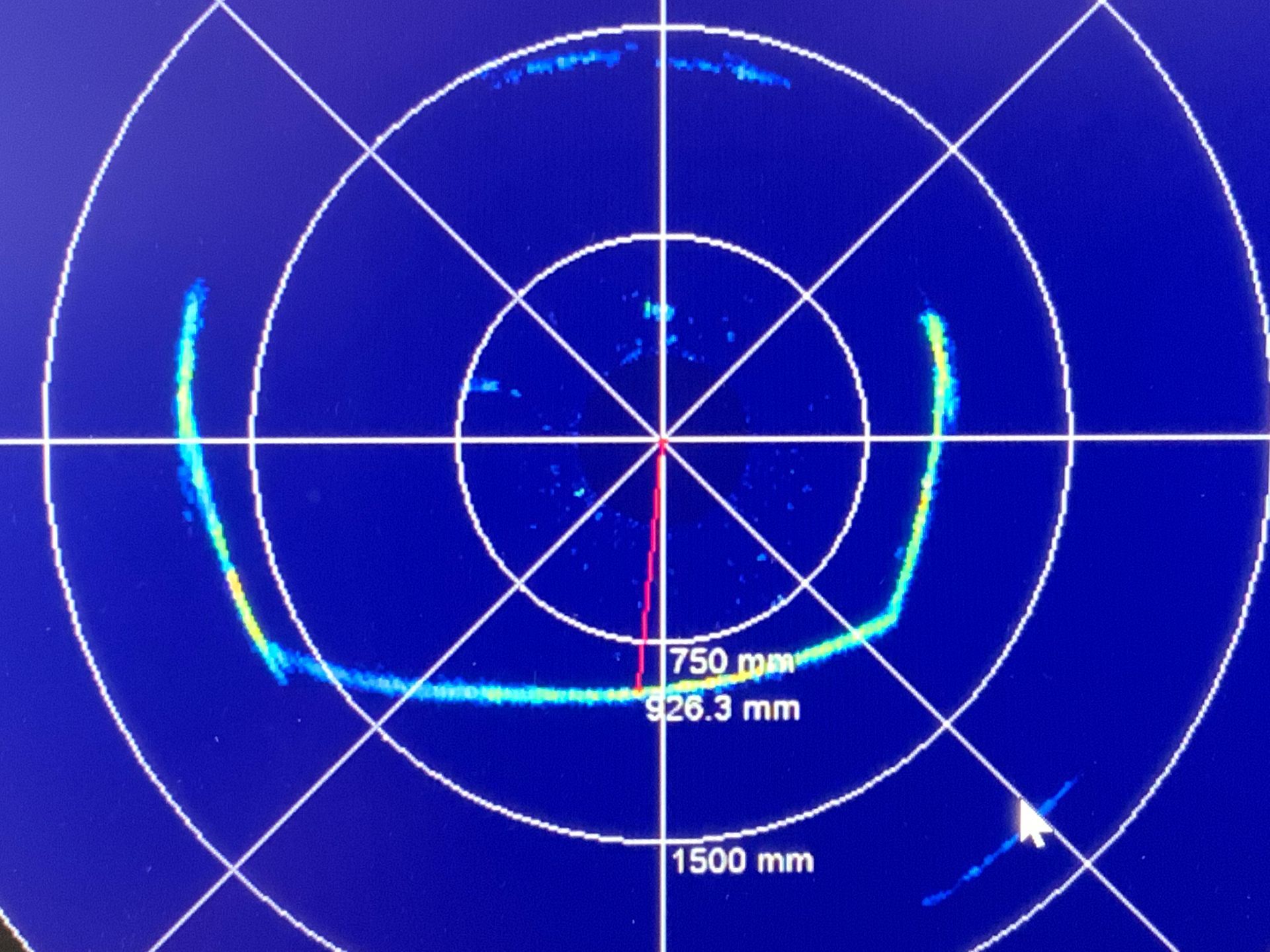
The sonar data gives a clear indication of the underwater structure, debris, silt and has the ability to find underwater connections. The data can be used along with the software to take measurements and calculations, furthermore that post processed data analysis can then be combined into a Cad model, annotated and coordinated or even silt levels modelled into a 3d solid model.
The trial has involved many hours and days of R&D, 10 people in their respected roles have all contributed to a successful survey along 190 meters of tunnel.
The onsite set up and deployment posses the hugest challenge, that basically equates into how you get a raft and all its hardware down a manhole with-out any entry, as proven it can be done in the right circumstances, for now unfortunately man entry cannot be ruled out to deploy a raft, the main factor is the size and set up of an entry location,
The Lidar data is currently undergoing further slam analysis to improve on the dataset, improvements in hardware, Imu's and considering using more than one device are just a few current options, a new technology has just been released which involves instantaneous slam, this if proven to be effective will save post processing time and will help developers and engineers explore the possibilities of using Lidar in other areas.
The sonar results where very informative and effective, taking the raw data from the sonar to create a Lidar style point cloud of the under-water structure is yet to be explored,
The next stage for CTS will be to redesign the raft system, with 12 kilometres of raft deployment carried out this year and from this trial we now have a better understanding of the typical site conditions, how the hardware works, weight, buoyancy, flow, balance and more, further trails of hardware will be carried out. CTS will now seek to design a large system similar to the one in the trial and a smaller version, our existing trail raft can be deployed and used in the field Today.


© Copyright CTS Ltd. 2023